Tecnologías 3D para la industria
Tiempo de lectura: 6 minutosLa visión 3D en sus múltiples facetas está abarcando casi cualquier aplicación y campo. Encontrándola tanto en temas de control de calidad, segmentación y guiado de robots. Pero el 3D abarca muchas tecnologías y la idea de esta serie de artículos es explicar cada una de ellas.
¿Qué tipo de tecnologías 3D son las más usuales en el sector industrial?
Tecnologías 3D en la industria.
La visión industrial cada día es más necesaria en la industria 4.0, gracias a ella se ha realizado un gran paso en la automatización de múltiples procesos.
Dentro de la visión industrial nos encontramos que una de las opciones que está creciendo más en los últimos años aparte del Deep Learning son las tecnologías 3D.
La visión 3D o tecnología 3D en sus múltiples facetas está abarcando casi cualquier aplicación y campo. Encontrándola tanto en temas de control de calidad, segmentación y guiado de robots. Pero el 3D abarca muchas tecnologías y la idea de esta serie de artículos es explicar cada una de ellas.
A la hora de escoger que tecnología 3D debemos usar deberemos de tener en cuenta tanto la aplicación que deseamos solucionar, como una serie de factores que serían:

Con todo ello nos podremos hacer una idea y probar una de las siguientes tecnologías. Las tecnologías 3D más utilizadas son:
• Triangulación laser
• Estero visión
• Proyección de luz estructurada
• Cámaras de Tiempo de Vuelo (TOF)
• Photometric Stereo
A continuación, explicamos de forma resumida cada una, además de los pros y los contras de cada una de ellas.
Triangulación laser
Los sistemas de triangulación laser son los sistemas más utilizados en el sector industrial para conseguir nubes de puntos (imágenes 3D). Se basan en proyectar una línea laser respecto de la cámara existiendo un ángulo conocido y fijo entre la cámara y el láser.
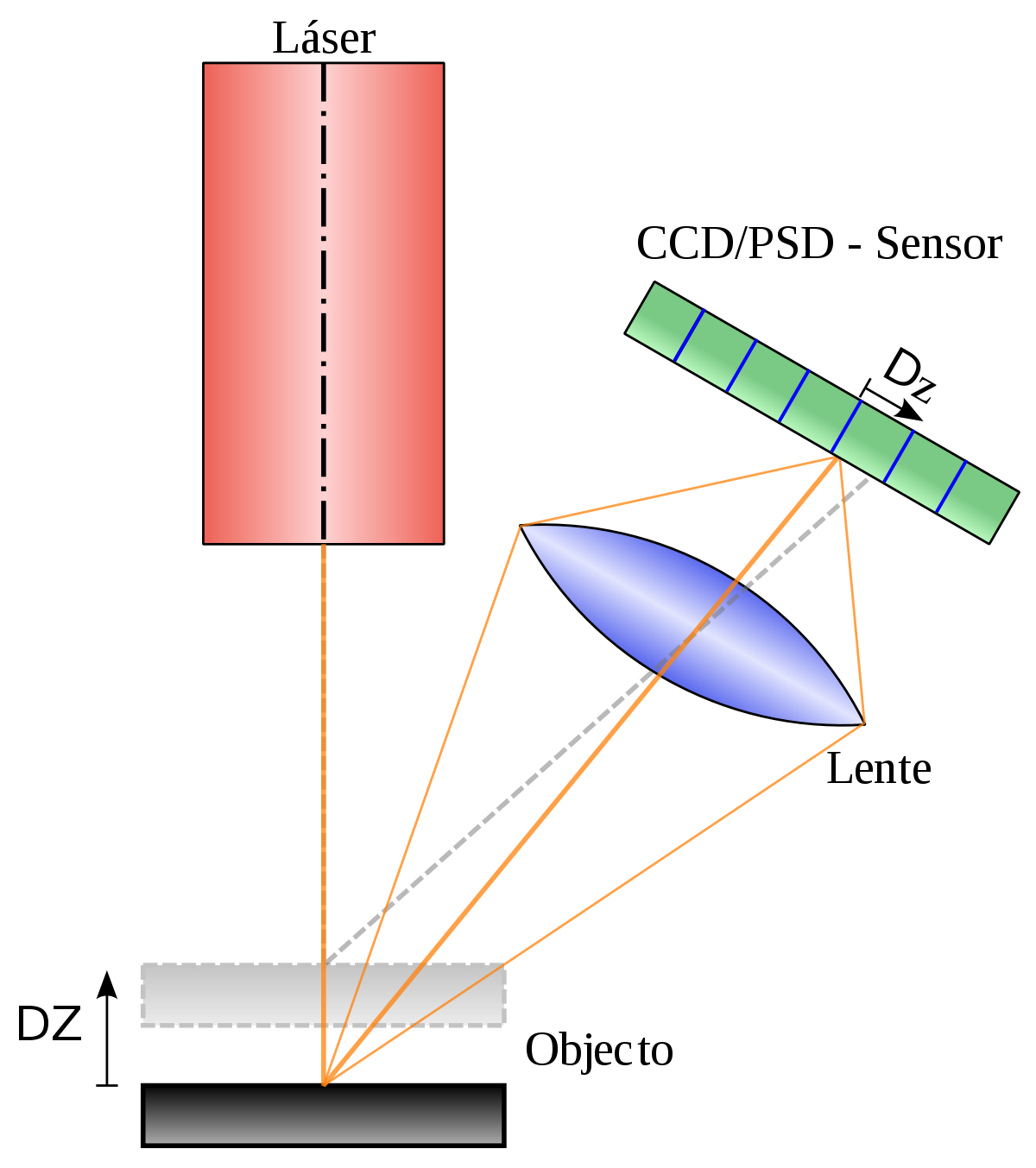
Imagen 1: Principio de un sensor de triangulación láser. El rayo láser se proyecta sobre el objeto. Las imágenes de la lente del láser apuntan al sensor. Una compensación de los objetos provoca una compensación en la imagen. Fuente: www.wikipedia.org
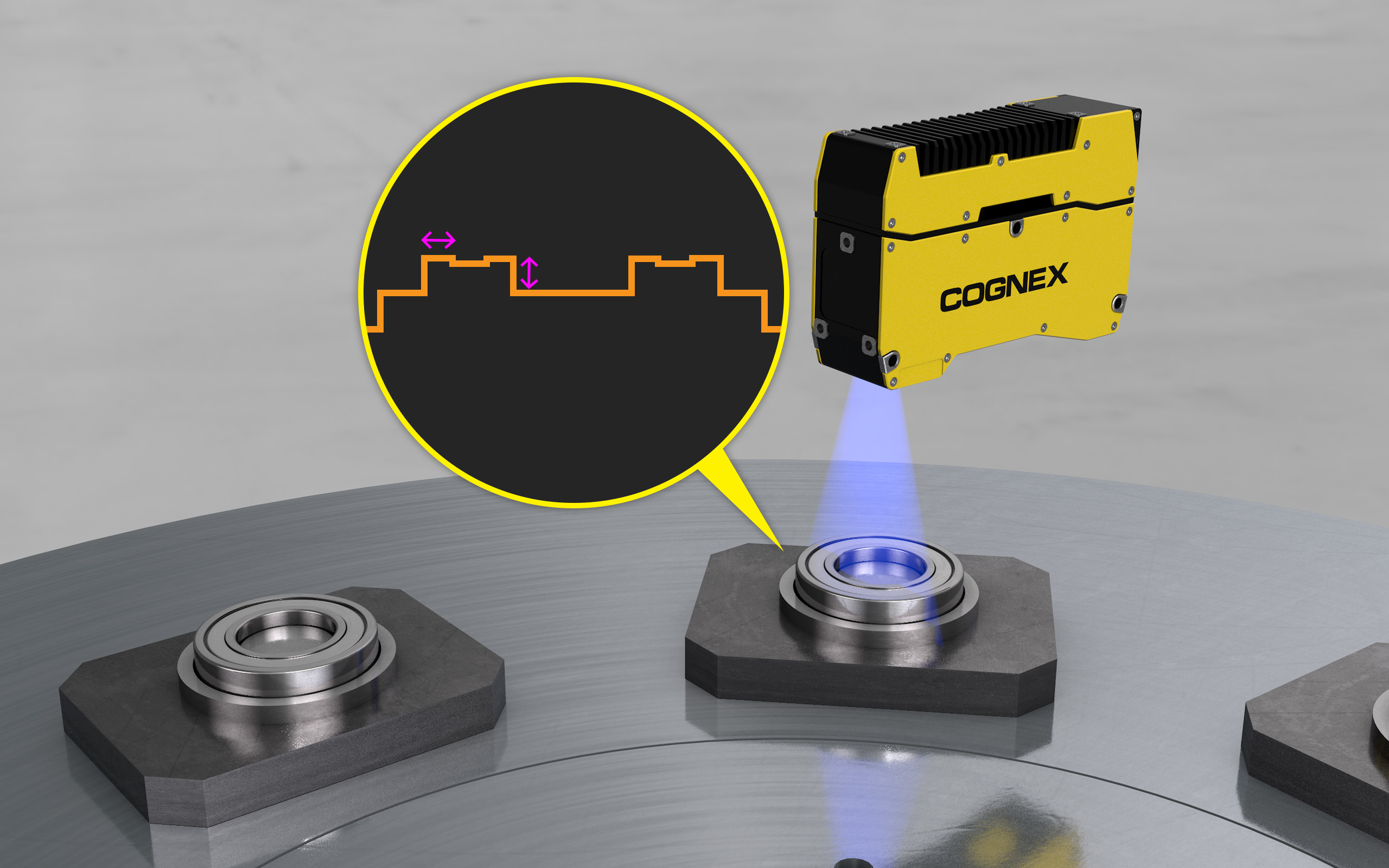
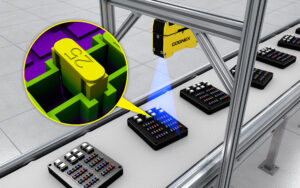
Imagen 2: Perfil 3D mediante perfilómetro Cognex. Fuente: www.Cognex.com
Como puntos fuertes esta tecnología nos permitiría trabajar con rangos de precisión muy altos sobre casi cualquier tipo de superficie lo cual hace que sea la tecnología más utilizada en 3D.
Como contras tiene que el eje Y depende de la precisión mecánica del sistema y de posibles oclusiones debidas a la geometría de la pieza vs inclinación conjunto cámara laser.
EJEMPLO DE APLICACIÓN:
Estereovisión
Los sistemas de estéreo visión se basan en contemplar un objeto desde más de un ángulo, conociendo la posición de las cámaras y el ángulo entre ellas y realizar una correlación de puntos en las dos imágenes. Estos sistemas intentan emular una de las formas que tiene la visión humana de estimar la profundidad del campo de visión (extraer información en Z).
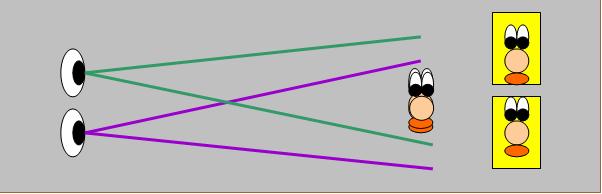
Imagen 3: Percepción en relieve de las imágenes: El ojo percibe los objetos en diferentes ángulos, creando la ilusión de profundidad de los objetos. Fuente: https://es.wikipedia.org
La gran ventaja del estero visión es el poder trabajar en movimiento y la velocidad de procesado, así como su bajo coste.
Como contras nos encontramos que precisa de mucha textura en las piezas para obtener una buena imagen 3D.
Proyección de luz estructurada
Los sistemas de proyección de luz estructurada son un hibrido entre la triangulación laser y los sistemas estéreo. Estos tipos de sistema proyectan diferentes patrones sobre la pieza, que debe de estar inmóvily con una o más cámaras realizan una triangulación de las franjas de los patrones. Habitualmente se empieza por franjas gruesas y poco a poco se va disminuyendo el grosor de las franjas para terminar desplazando el patrón de franjas más finas.
Con ello conseguimos una gran precisión y evitamos oclusiones. En los últimos años esta tecnología está en auge saliendo incluso equipos que nos permiten trabajar en movimiento como seria el Photoneo Motion.
Cámaras de Tiempo de Vuelo (TOF)
Las cámaras de Tiempo de Vuelo o TOF (Time Of Flight) son sistemas de visión 3D que su concepto tecnológico es completamente distinto a los que hemos visto hasta el momento. En esta tecnología se calcula la profundidad para todos los pixeles de la imagen y no se utiliza ningún tipo de triangulación.
El sistema se basa en calcular el tiempo que tarda la luz en salir de la cámara, en rebotar al objeto que queremos medir y en volver otra vez a la cámara. De esta forma conseguimos nubes de puntos a tiempo real pudiendo conseguir 100 imágenes por segundo.
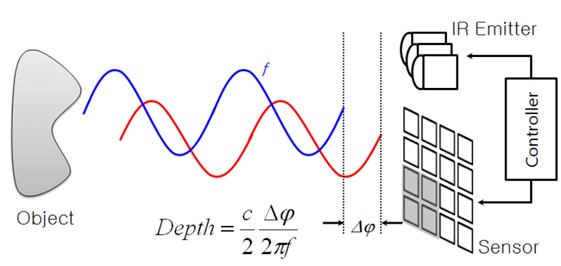
Imagen 4: Esquema de funcionamiento de una cámara TOF. Fuente: https://fab.cba.mit.edu/
Ventajas: Esta tecnología que debido a las limitaciones en la precisión hasta hace unos años se usaba más para el guiado de vehículos que para aplicaciones industriales, con la disminución de costes y la mejora en las precisiones se empieza a usar para aplicaciones de picking en robots o cálculo de volúmenes a tiempo real.
Como desventaja podemos encontrarnos con escenas complejas con múltiples objetos, donde la luz IR rebota en un segundo objeto antes de regresar al sensor. Normalmente, esto produce en escenas muy complejas provocando esquinas redondeadas con pérdida de detalles en las imágenes.
Photometic Stereo
El Photometric Stereo igual que la perspectiva o el Moiré son técnicas 3D que nos aportan información en 3D (Pseudo imágenes) pero no nos dan datos reales que podamos cuantificar.
En este caso el sistema se basa en iluminar la pieza con un sistema de iluminación de 4 luces puntuales a 90º cada una de ellas y con una cierta inclinación respecto a la cámara.
El sistema captura una imagen para cada luz obteniendo 4 imágenes.
Procesando las diferentes imágenes viendo las zonas donde la luz se mantiene constante y las zonas donde la luz varía más.
Esta tecnología está más pensada para detectar defectos superficiales que para realizar mediciones ya que no nos aporta escala de profundidad y solo nos marca el gradiente en el eje Z.
Ejemplo de adquisición de imágenes mediante sistema trevista®
El dispositivo trevista® se basa en una tecnología patentada «forma a partir del sombreado», lo que significa que se puede obtener información sobre la forma tridimensional de un objeto a partir del sombreado de las superficies. La superficie para comprobar se ilumina de forma difusa mediante un cuerpo dispersor semiesférico. A partir de varias imágenes de entrada, un algoritmo especial calcula imágenes de resultados de alta calidad para su posterior evaluación automática.

Información de brillo: Imagen de textura. Las propiedades de brillo de la superficie se evalúan en la imagen de textura para que también se puedan detectar características de defectos como decoloraciones y daños de oxido.
Información topográfica: imagen de curvatura. La imagen de curvatura es independiente de la dirección y contiene toda la información topográfica de las dos imágenes de pendiente.
Información topográfica: imágenes de pendiente en dirección y.
Las dos imágenes de pendiente en las direcciones x e y dependen de la dirección y son especialmente adecuadas para evaluar fallas con una dirección preferida y desviaciones de forma, como por ejemplo abolladuras.

Información topográfica: imágenes de pendiente en dirección x.
Escrito por Oriol Verdú, Technical Office & Product Manager en Grupo Bcnvision.
¿Quieres seguir leyendo blogs sobre visión artificial? haz clic aquí
Conocer soluciones reales de visión
¿Tienes un proyecto y necesitas realizar alguna consulta? Contacta con Bcnvision.