Technologies 3D pour l’industrie
Quelles sont les technologies 3D les plus répandues dans le secteur industriel?
Technologies 3D dans l’industrie.
La vision industrielle devient de plus en plus nécessaire dans l’industrie 4.0, grâce à laquelle un grand pas en avant a été fait dans l’automatisation de multiples processus.
Au sein de la vision industrielle, nous constatons que l’une des options qui se développe davantage ces dernières années, en dehors du Deep Learning, sont les technologies 3D.
La vision 3D ou la technologie 3D sous ses nombreuses facettes couvre presque toutes les applications et tous les domaines. On la retrouve dans le contrôle de la qualité, la segmentation et le guidage des robots. Mais la 3D englobe de nombreuses technologies et l’idée de cette série d’articles est d’expliquer chacune d’entre elles.
Pour choisir la technologie 3D à utiliser, nous devons tenir compte de l’application que nous voulons résoudre, ainsi que d’une série de facteurs:
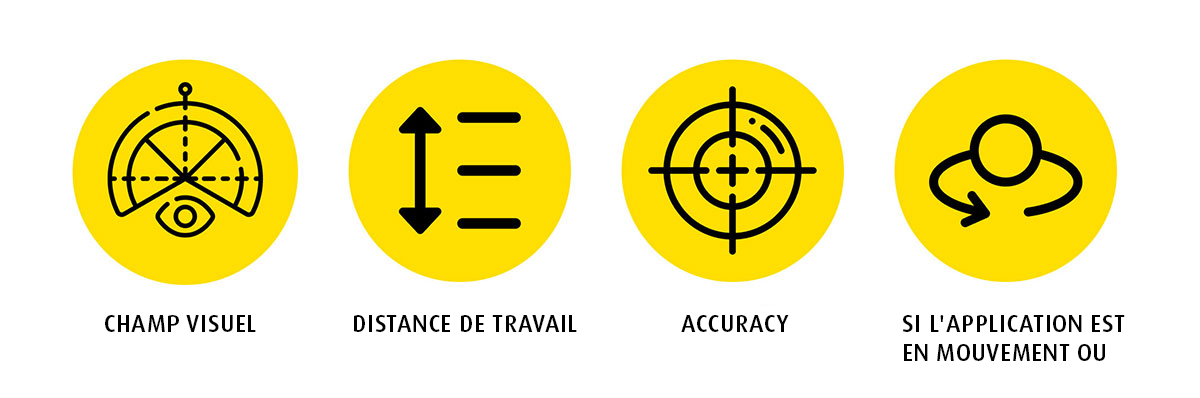
Avec tout cela, nous pouvons nous faire une idée et essayer l’une des technologies suivantes. Les technologies 3D les plus couramment utilisées sont les suivantes
– Triangulation laser
– Vision stéréo
– Projection de lumière structurée
– Caméras à temps de vol (TOF)
– Stéréo photométrique
Voici une brève explication de chacune de ces méthodes, ainsi que de leurs avantages et inconvénients.
Triangulation laser
Les systèmes de triangulation laser sont les plus utilisés dans le secteur industriel pour obtenir des nuages de points (images 3D). Ils reposent sur la projection d’une ligne laser par rapport à la caméra, avec un angle connu et fixe entre la caméra et le laser.
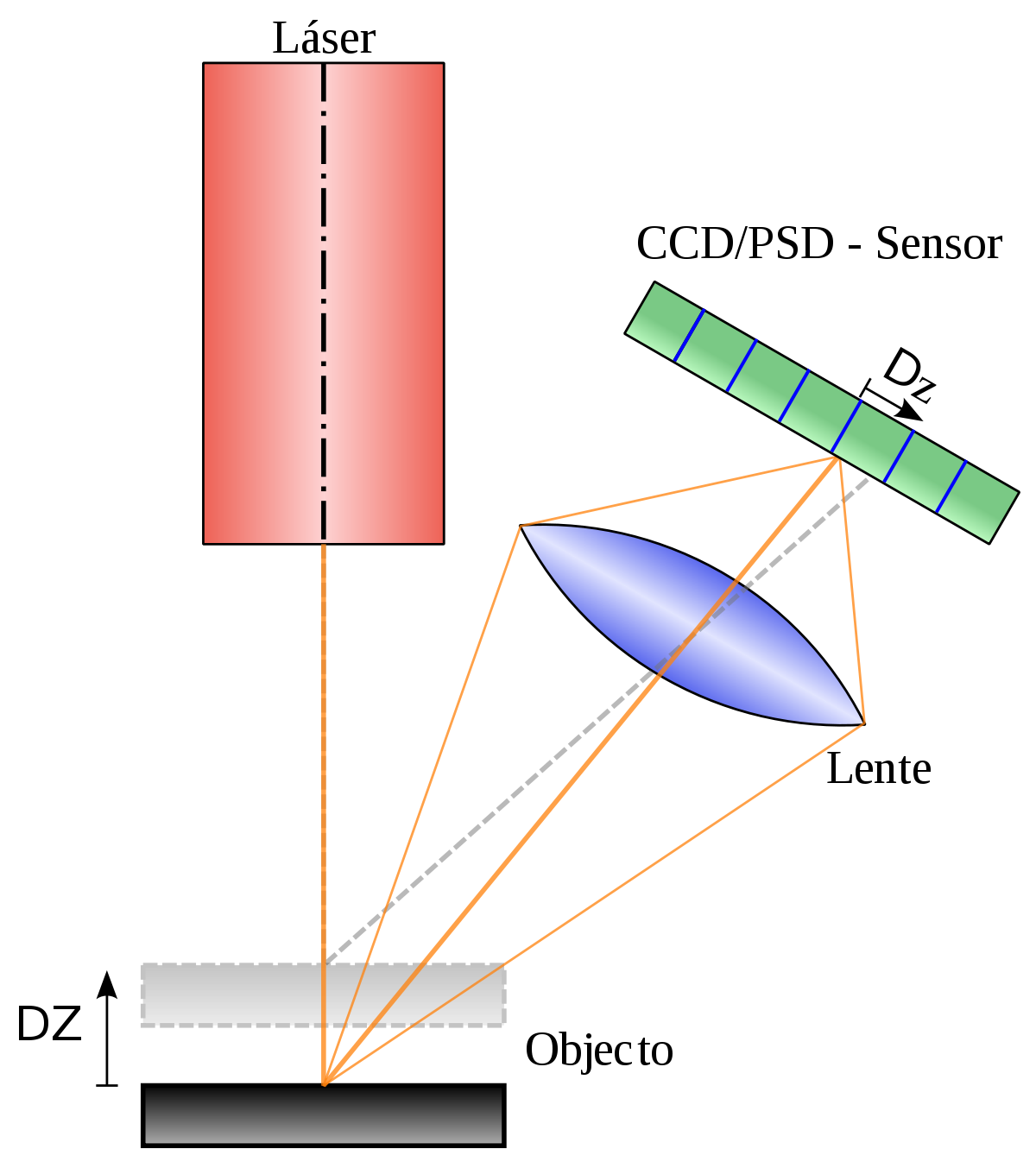
Figure 1 : Principe d’un capteur à triangulation laser. Le faisceau laser est projeté sur l’objet. Les images de la lentille laser sont dirigées vers le capteur. Une compensation des objets entraîne une compensation de l’image. Source : www.wikipedia.org
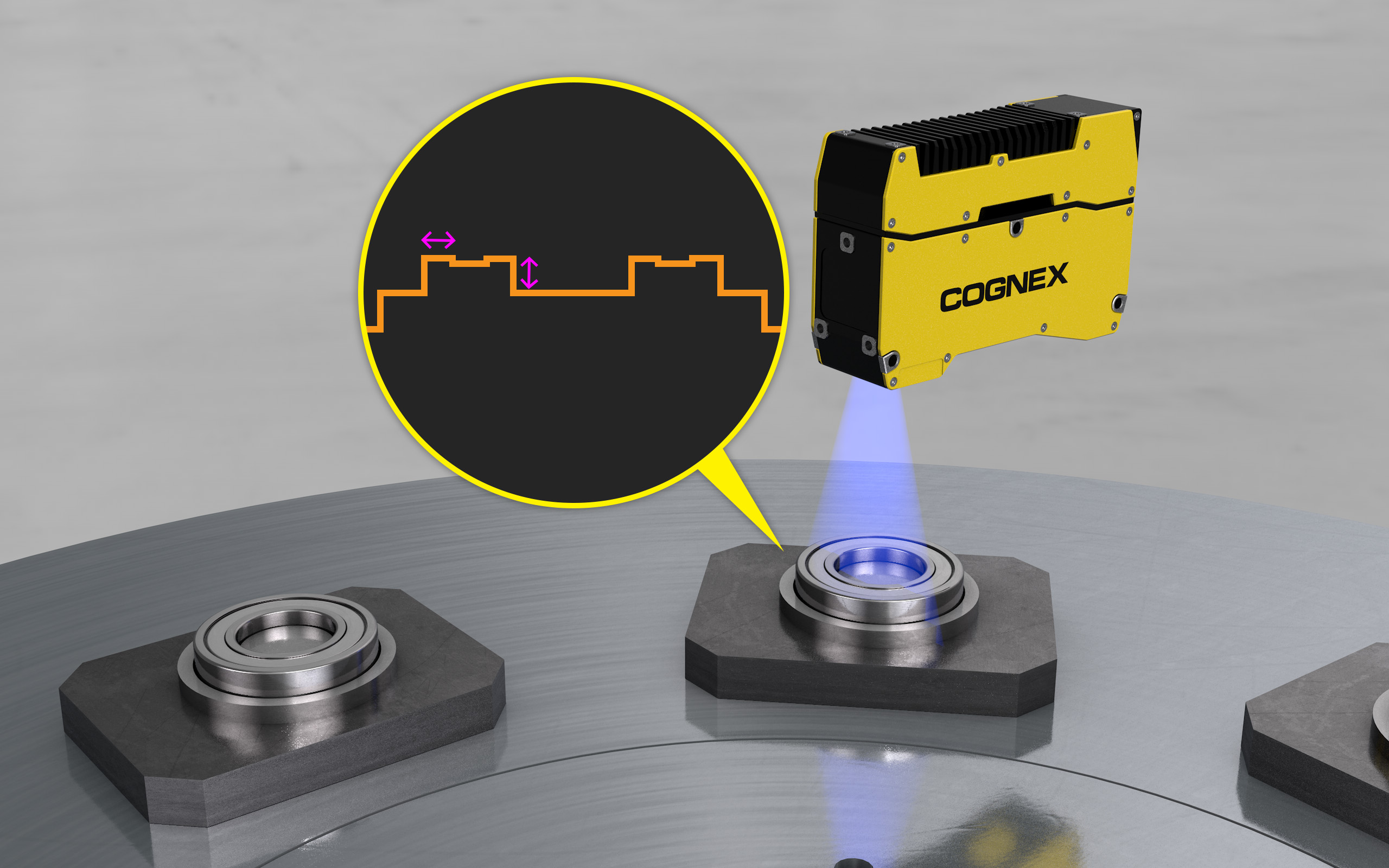
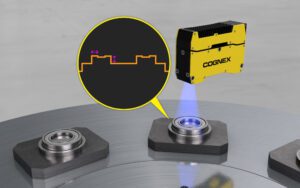
Figure 2 : Profil 3D à l’aide d’un profilomètre Cognex. Source : www.Cognex.com
Les points forts de cette technologie sont qu’elle permet de travailler avec des plages de précision très élevées sur presque tous les types de surface, ce qui en fait la technologie la plus utilisée en 3D.
Ses inconvénients sont que l’axe Y dépend de la précision mécanique du système et des occlusions possibles dues à la géométrie de la pièce par rapport à l’inclinaison de la caméra laser dans son ensemble.
EXEMPLE D’APPLICATION :
Stéréovision
Les systèmes de stéréovision sont basés sur l’observation d’un objet sous plusieurs angles, sur la connaissance de la position des caméras et de l’angle qui les sépare, et sur la corrélation des points dans les deux images. Ces systèmes tentent d’imiter l’une des façons dont la vision humaine estime la profondeur du champ de vision (extraction d’informations en Z).
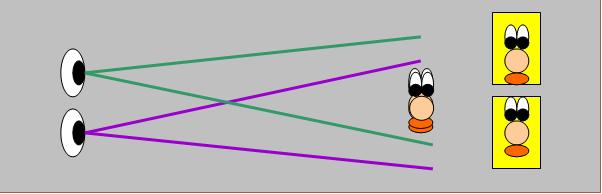
Image 3 : Perception en relief des images : L’œil perçoit les objets sous différents angles, ce qui crée l’illusion de la profondeur des objets. Source : https://es.wikipedia.org
Le grand avantage de la vision stéréoscopique est sa capacité à travailler en mouvement et la rapidité de son traitement, ainsi que son faible coût.
L’inconvénient est qu’elle nécessite beaucoup de texture dans les pièces pour obtenir une bonne image 3D.
Projection de lumière structurée
Les systèmes de projection de lumière structurée sont un hybride entre la triangulation laser et les systèmes stéréo. Ces types de systèmes projettent différents motifs sur la pièce, qui doit être immobile, et une ou plusieurs caméras triangulent les franges des motifs. Ils commencent généralement par des bandes épaisses et diminuent progressivement l’épaisseur des bandes pour finir par déplacer le motif de bandes plus fines.
Cette méthode permet d’obtenir une grande précision et d’éviter les occlusions. Depuis quelques années, cette technologie est en plein essor, avec des équipements qui permettent même de travailler en mouvement, comme le Photoneo Motion.
Caméras à temps de vol (TOF)
Les caméras à temps de vol (TOF) sont des systèmes de vision 3D dont le concept technologique est complètement différent de ce que nous avons vu jusqu’à présent. Dans cette technologie, la profondeur est calculée pour tous les pixels de l’image et aucune triangulation n’est utilisée.
Le système est basé sur le calcul du temps nécessaire à la lumière pour quitter la caméra, rebondir sur l’objet que l’on veut mesurer et revenir à la caméra. On obtient ainsi des nuages de points en temps réel et on peut obtenir 100 images par seconde.
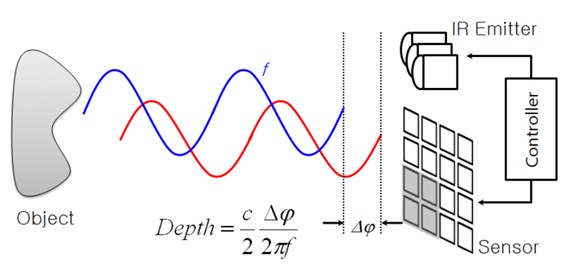
Figure 4 : Schéma du fonctionnement d’une caméra TOF. Source : https://fab.cba.mit.edu/
Avantages : Cette technologie qui, en raison des limitations de précision, était jusqu’à il y a quelques années davantage utilisée pour le guidage de véhicules que pour des applications industrielles, commence, avec la baisse des coûts et l’amélioration de la précision, à être utilisée pour des applications de picking dans des robots ou pour le calcul de volumes en temps réel.
D’un autre côté, nous pouvons rencontrer des scènes complexes avec plusieurs objets, où la lumière infrarouge rebondit sur un deuxième objet avant de revenir au capteur. Il en résulte généralement des scènes très complexes, avec des coins arrondis et une perte de détails dans l’image.
Stéréo photométrique
La stéréoscopie photométrique, comme la perspective ou le moiré, sont des techniques 3D qui nous fournissent des informations 3D (pseudo-images) mais ne nous donnent pas de données réelles que nous pouvons quantifier.
Dans ce cas, le système est basé sur l’illumination de la pièce avec un système d’éclairage composé de 4 lumières ponctuelles à 90º chacune et avec une certaine inclinaison par rapport à la caméra.
Le système capture une image pour chaque lumière, ce qui permet d’obtenir 4 images.
Les différentes images sont traitées pour voir les zones où la lumière reste constante et les zones où la lumière varie le plus.
Cette technologie est plus destinée à la détection de défauts de surface qu’à des mesures, car elle ne fournit pas d’échelle de profondeur et ne montre que le gradient dans l’axe Z.
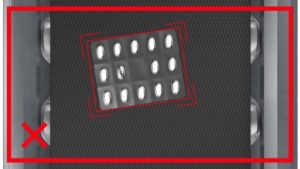
Exemple d’acquisition d’images avec le système trevista
Le dispositif trevista® est basé sur une technologie brevetée « shape from shading », ce qui signifie que des informations sur la forme tridimensionnelle d’un objet peuvent être obtenues à partir de l’ombrage des surfaces. La surface à tester est éclairée de manière diffuse par un corps diffusant hémisphérique. À partir de plusieurs images d’entrée, un algorithme spécial calcule des images de résultats de haute qualité pour une évaluation automatique ultérieure.

Informations sur la brillance : image de texture. Les propriétés de brillance de la surface sont évaluées dans l’image de texture, ce qui permet de détecter les défauts tels que les décolorations et les dégâts causés par la rouille.
Informations topographiques : image de courbure. L’image de courbure est indépendante de la direction et contient toutes les informations topographiques des deux images de pente.
Informations topographiques : images des pentes dans l’axe des y: Les deux images de pente dans les directions x et y en fonction de la direction y sont particulièrement adaptées à l’évaluation des défauts avec une direction préférentielle et des déviations de forme, par exemple des bosses.

Informations topographiques : images des pentes dans la direction x.
Écrit par Oriol Verdú, Technical Office & Product Manager chez Bcnvision Group.
Voulez-vous continuer à lire des blogs sur la vision industrielle ? cliquez ici
Découvrez de vraies solutions de vision
Vous avez un projet et vous souhaitez poser une question ? Contactez Bcnvision.