Robotique industrielle : IA et vision artificielle.
Robotique industrielle. Ces dernières années, on a beaucoup parlé de l’industrie 4.0 comme de la nouvelle révolution qui passe du physique au numérique, en connectant tous les dispositifs de la chaîne de production grâce à l’IoT ou internet des objets, qui permet de contrôler tous les processus industriels en temps réel et qui, grâce aux nouvelles technologies de l’intelligence artificielle, permet une analyse plus précise, prédictive et efficace des données. En outre, elle donne la possibilité d’automatiser certains processus en fournissant de l’intelligence à des machines capables de résoudre de nombreuses tâches rapidement et avec de meilleurs résultats que ceux que nous pouvons obtenir en tant qu’humains.
Cette révolution risque non seulement d’affecter la chaîne de production et le mode de fonctionnement de l’industrie, mais aussi de bouleverser directement la société et la manière dont les entreprises interagissent avec leurs clients. Elle modifiera également le rôle des employés, qui devront posséder des connaissances techniques plus approfondies pour assurer la maintenance des systèmes et des dispositifs de la chaîne de valeur dans un secteur industriel et une robotique industrielle de plus en plus exigeants.

Robotique industrielle
Aujourd’hui, en entrant dans une usine de production, il n’est pas rare de trouver une multitude d’applications de robotique industrielle, des bras robotisés effectuant des tâches répétitives qui augmentent la production en automatisant certains processus de palettisation ou de dépalettisation, d’assemblage, de soudage, de manutention, de déplacement de charges, de peinture, d’emballage, d’inspection et de contrôle de la qualité, entre autres. Les robots industriels sont présents dans le secteur industriel depuis plus de 40 ans et depuis qu’ils ont commencé à être introduits comme outil fondamental dans les processus d’automatisation industrielle, l’évolution du matériel et des logiciels a été exponentielle, tout comme les cas d’utilisation. Outre le bras robotique industriel bien connu et très répandu, il est très courant de trouver d’autres robots qui font partie de la routine de nombreuses usines dans différents secteurs de l’industrie. Actuellement, nous pouvons mettre en évidence:
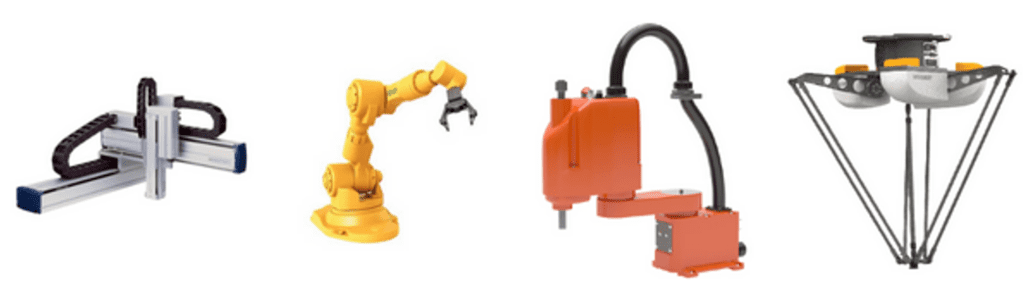
- Bras robotique industriel : En robotique industrielle, c’est un bras mécanique programmable, capable d’effectuer des tâches répétitives sans repos en substitution de l’opérateur humain. Ils peuvent déplacer des poids légers ou importants, selon le modèle de robot, à une cadence élevée, ce qui permet d’augmenter les processus de production et de réduire leurs coûts. Un point important est le facteur sécurité qui, grâce à des réglementations strictes, garantit et tente d’éviter les accidents. On peut citer les robots à 6 axes comme l’un des plus répandus, bien qu’il existe de nombreuses autres options en fonction du cas d’utilisation ou des exigences de l’application, comme les robots araignées, les robots scara ou les robots cartésiens.
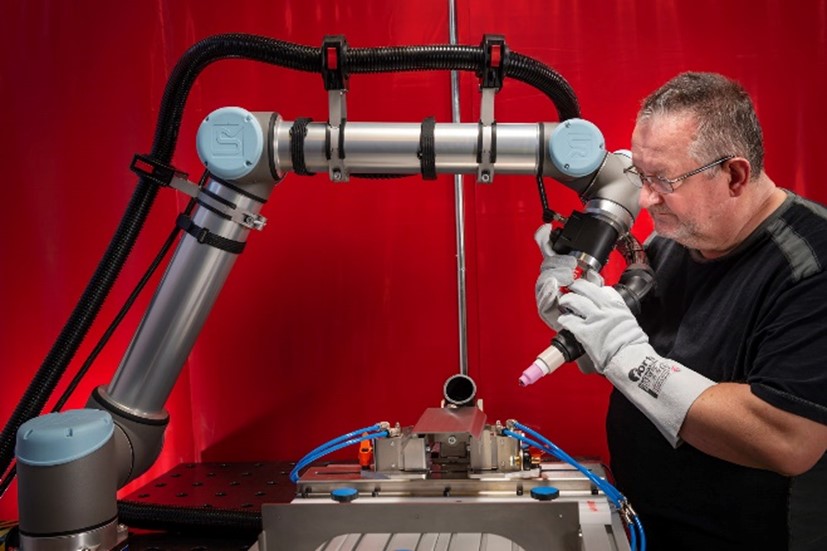
- Cobots: en robotique industrielle, les robots collaboratifs ont un objectif similaire à celui des bras robotiques, à la différence près qu’ils sont conçus pour travailler avec des personnes. Ils déplacent généralement des charges plus légères à des vitesses plus faibles et sont équipés de capteurs de force ou d’intensité sur leurs axes permettant un arrêt d’urgence automatique en cas d’obstruction ou de collision. Cela permet de placer le cobot dans le processus de production sans barrières et en collaboration avec les opérateurs. Ils sont généralement facilement programmables, de sorte qu’ils ne nécessitent pas d’opérateurs ayant un niveau technique élevé pour pouvoir les manipuler.
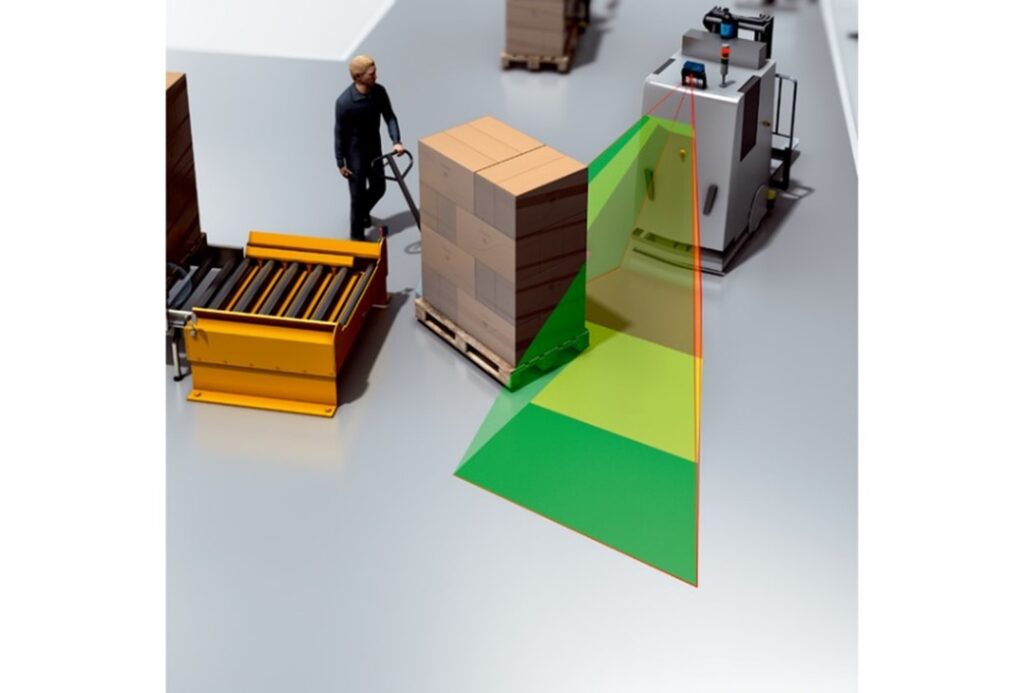
- AGV: les véhicules à guidage automatique sont un type de robot qui se déplace dans un espace sans avoir besoin d’un conducteur. Ils sont très courants dans le domaine de la logistique pour le transport de charges ou de produits, bien qu’ils se soient répandus dans d’autres secteurs industriels pour charger et décharger de manière autonome des services de transport, déplacer des colis ou transporter des charges entre différents points de l’usine. Nous pouvons trouver différentes options ou technologies qui utilisent le philoguide, la vision artificielle, le laser, entre autres, pour pouvoir reconnaître l’environnement et pouvoir s’y déplacer de manière sûre et efficace.

- Les drones: Comme les agv, les drones sont des véhicules aériens sans pilote. Ils ne sont actuellement pas aussi répandus dans l’industrie que les cas précédents et sont généralement contrôlés à distance, bien que les drones autonomes soient à un stade de développement très avancé. Ils sont très utiles pour inspecter des zones étendues ou difficiles d’accès et c’est pourquoi ils intègrent généralement des caméras de vision pour effectuer des contrôles de qualité des structures ou des lignes à haute tension, des cartes topographiques, la lutte contre les parasites dans l’agriculture, entre autres cas d’utilisation.

L’intelligence artificielle dans la robotique industrielle
Malgré la rapidité de l’évolution du domaine de l’intelligence artificielle et les grands progrès réalisés ces dernières années, il existe un paradoxe général concernant le fait que de nombreuses tâches innées chez l’homme sont très difficiles ou pratiquement impossibles à résoudre à l’aide de modèles d’intelligence artificielle, par exemple avoir des émotions ou simplement vider un lave-vaisselle, alors que d’autres tâches très difficiles à réaliser pour nous, l’intelligence artificielle est capable de les résoudre sans que nous sachions exactement comment elle est arrivée à un résultat particulier, comme par exemple prédire le sexe d’une personne simplement en analysant la rétine d’une photo du fond de son œil, chose que même la communauté des experts en ophtalmologie ne sait pas très bien faire.
Certaines études suggèrent que les fonctions des mains et des doigts que nous exécutons sans réfléchir sont en fait réalisées sur la base de l’énorme quantité d’informations stockées dans le cerveau. Par conséquent, l’étude du développement de ces fonctions dans la robotique est un problème difficile qui est directement lié à l’étude de l’intelligence humaine.
L’une des stratégies de robotisation des processus de fabrication consiste à acquérir le comportement de l’homme au travail. Des modèles d’apprentissage par renforcement sont actuellement étudiés pour apprendre aux robots à imiter et à apprendre par essais et erreurs.
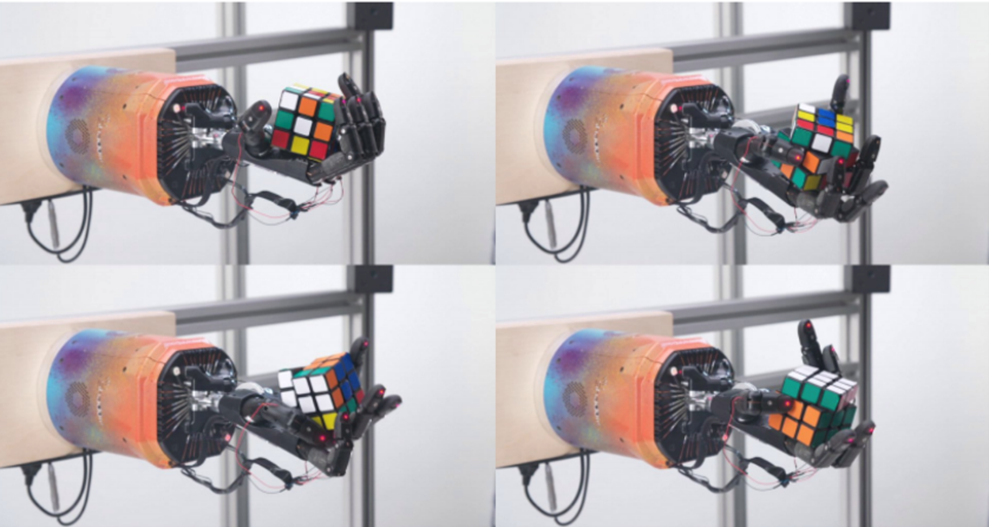
Figura 6. Robot haciendo cubo rubik Fuente: OpenAI (2021)
Ainsi, nous pourrions dire que la prochaine étape au sein de l’industrie 4.0 est de pouvoir donner plus d’autonomie à la robotique industrielle, aux robots industriels, et cela implique l’étude et l’application de nouvelles technologies en matière d’intelligence artificielle. Nous espérons ainsi obtenir des machines plus autonomes, capables de prendre des décisions en temps réel et dans l’environnement de production, en collaboration avec d’autres machines et avec les opérateurs.
Il existe de nombreux facteurs auxquels la communauté scientifique, les grandes entreprises et les développeurs consacrent tous leurs efforts et qui influenceront directement l’adaptation des robots autonomes à l’industrie, comme les avancées dans le domaine de l’apprentissage automatique, de l’apprentissage profond, du calcul parallèle ou à haute performance et de la 5G, entre autres. Pour atteindre cette autonomie, il n’est pas seulement nécessaire de travailler sur les appareils, il faut aussi créer un environnement où, grâce à l’IoT, les machines peuvent accéder aux informations qui leur permettent de remplir leurs fonctions, de recevoir des ordres de travail, d’effectuer une maintenance prédictive et d’optimiser les processus de production en général.
La vision industrielle appliquée à la robotique industrielle
Dans le cadre de la robotique industrielle, l’un des aspects à prendre en compte dans la recherche de l’autonomie des robots est la compréhension du milieu environnant, et la vision artificielle joue ici un rôle très important. De manière générale, la vision artificielle consiste à donner aux machines la capacité de voir, d’analyser et de comprendre, de sorte qu’elles soient capables de localiser des objets, de les identifier, de les différencier, entre autres, afin de prendre des décisions sur la base des caractéristiques extraites.
Dans le domaine du Deep Learning, la vision artificielle est l’un des aspects qui a le plus évolué au cours de la dernière décennie grâce à l’apparition des réseaux neuronaux convolutifs capables de capturer, d’apprendre et d’extraire des caractéristiques globales et locales du contenu d’une image, voire de coder ces caractéristiques au moyen des transformées de plus en plus répandues héritées du NLP ou traitement du langage naturel, l’apprentissage et l’extraction de caractéristiques globales et locales du contenu d’une image ou encore l’encodage de ces caractéristiques à travers les transformations de plus en plus répandues héritées du NLP ou traitement du langage naturel et toutes les études et projets subséquents vers de nouvelles architectures et modèles capables de résoudre des tâches de classification, de localisation d’objets en 2D et 3D, de segmentation sémantique, instanciée ou panoptique, de génération de données synthétiques, de transfert de styles, de génération d’images à partir de textes, parmi tant d’autres.
Malgré ces avancées, si l’on regarde en arrière avant même l’explosion du Deep Learning, la vision artificielle appliquée à la robotique est utilisée dans les processus d’automatisation industrielle depuis de nombreuses années. Certains des cas d’utilisation sont:
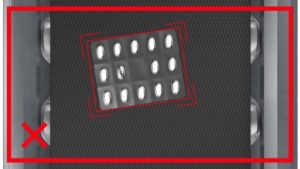
- Pick & Place: Au moyen d’une caméra 2D, un objet formé est localisé, normalement avec un algorithme de motif géométrique, renvoyant les coordonnées au robot sur la base d’un calibrage précédent du robot et de la caméra. Le robot saisit l’objet et le place dans une autre position, qui peut être l’alimentation d’une machine, l’emballage, l’assemblage, entre autres.

- Bin Picking: il s’agit d’une évolution du prélèvement et du placement, mais en travaillant avec des données 3D. Les pièces entrent dans le conteneur de n’importe quelle manière et il est habituel de charger le cad de la pièce dans le logiciel pour la localisation 3D de celle-ci à l’intérieur de la scène, afin que nous puissions renvoyer la pose (x, y, z, rx, ry, rz) de la pièce dans la base du robot pour que celui-ci puisse aller la chercher.
- Dépalettisation: elles sont généralement structurées et fonctionnent par étage. Une caméra 2D, 3D ou RGBD peut être utilisée pour localiser la pièce et renvoyer la pose au robot.
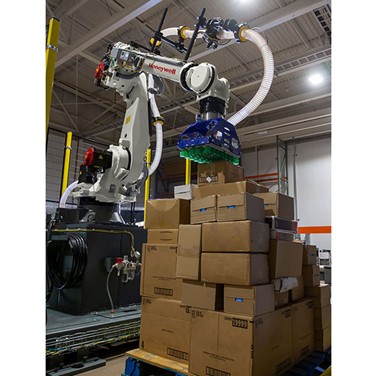
- Palettisation: dans de nombreux cas, comme le robot palettise, il n’a pas besoin de vision car il suit un algorithme de tri, bien que des caméras puissent être utilisées pour localiser les espaces libres sur une palette et palettiser de manière autonome en fonction des besoins. Ceci est utile lorsque les tailles des objets, souvent des boîtes, sont différentes et se présentent de manière aléatoire.

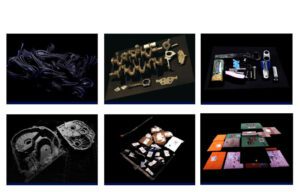
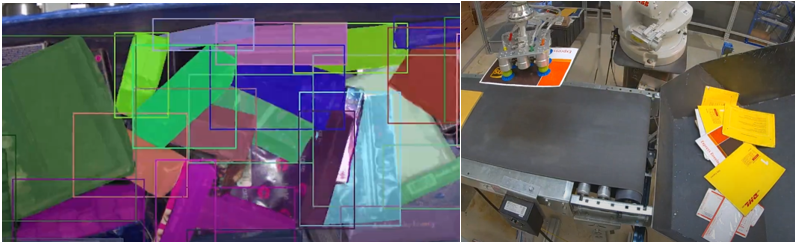
- Prélèvement d’objets de formes irrégulières: ce type de prélèvement est conçu pour localiser et prélever des objets de formes et de tailles différentes dans une même boîte ou sur un même tapis roulant. Il utilise des algorithmes d’apprentissage profond de segmentation et de détection d’objets pour trouver le centre de masse de ces objets généralement dans l’image 2D qui a une corrélation directe avec une image 3D, de sorte que lorsque le centre de masse est trouvé, la pose de celui-ci peut être donnée sur la base du robot.
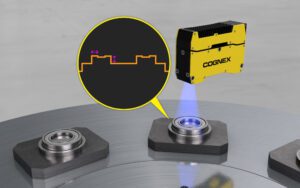
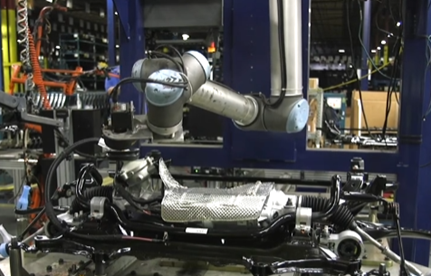
- Contrôles de qualité à l’aide de robots: cette application dispose généralement d’un dispositif d’acquisition d’images dans la main du robot, en 2D ou en 3D, pour pouvoir accéder à différentes zones de l’objet à inspecter ou le scanner en le balayant, obtenant ainsi une représentation 3D de la pièce grâce à la composition des différentes acquisitions.
- Détection des obstacles: Outre la manipulation des pièces, la vision est très utile dans les agvs et les drones pour éviter les collisions avec les obstacles. Ils se substitueraient aux capteurs avec la particularité de pouvoir être alimentés par une intelligence artificielle pour comprendre les objets qui se trouvent sur leur chemin.
De nouveaux outils de Deep Learning sont actuellement développés pour aider les robots à mieux comprendre le monde qui les entoure et à effectuer des tâches de plus en plus autonomes. Voici quelques-uns des nombreux projets en cours de réalisation:
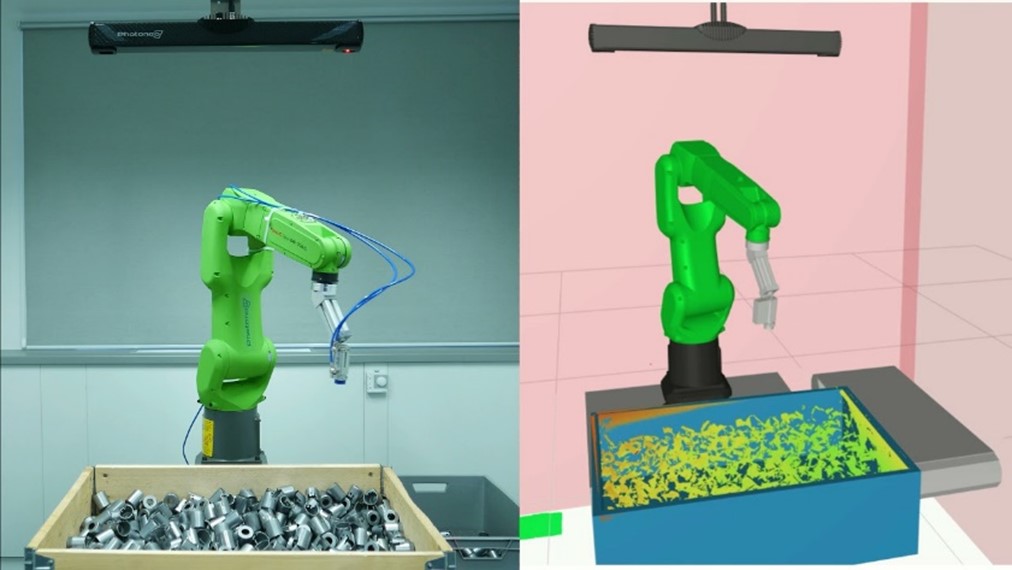
- Jumeaux numériques: Les jumeaux numériques sont utilisés depuis longtemps pour la simulation robotique industrielle, notamment pour les études de faisabilité des projets et pour connaître les temps de cycle, les charges, la longueur suffisante pour atteindre tous les points, entre autres. Mais grâce aux nouvelles avancées de l’intelligence artificielle, ces simulations peuvent être utilisées pour former des modèles d’intelligence artificielle, comme cela se fait par exemple dans le domaine de la conduite autonome, où des ensembles de données annotées automatiquement sont générés, ce qui supprime une grande partie du travail manuel pour les modèles supervisés, et même des situations difficiles à créer dans la vie réelle mais qui pourraient se produire, par exemple, un avion qui atterrit sur l’autoroute est peu probable mais pas impossible. Il a été démontré qu’en entraînant une machine dans un simulateur, puis en ajoutant des échantillons réels pour régler le système, l’efficacité est très élevée. Cela ouvre une nouvelle voie pour faciliter la formation et la mise en œuvre d’installations robotiques industrielles de toutes sortes, des bras robotisés aux véhicules guidés.

- Données synthétiques: un autre domaine dans lequel des travaux sont menés dans le cadre du Deep Learning est la génération automatique d’images synthétiques. Grâce aux progrès des réseaux adversariens génératifs (GANS) ou des modèles de diffusion, il est possible d’entraîner un réseau pour créer des données numériques qui peuvent être utilisées pour générer un long ensemble de données précises et pré-annotées.

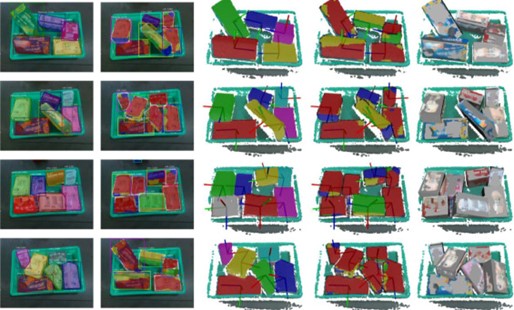
- Segmentation 3D: il s’agit d’une tâche qui commence à être introduite dans certains systèmes de prélèvement de bacs afin de tirer parti de l’utilisation du Deep Learning en 3D et qui aura de nombreux cas d’utilisation au sein de la robotique industrielle, car elle permet de classer tous les points d’un nuage de points dans la classe ou l’objet auquel ils appartiennent, de sorte qu’il ne sera pas nécessaire d’utiliser le cad ou un modèle entraîné pour rechercher des objets dans la scène 3D. Actuellement, de nombreux travaux sont menés pour améliorer la précision de la détection, notamment afin de pouvoir séparer les objets les uns des autres.
- Guidage de l’assemblage: en robotique industrielle, les robots apprennent à partir de l’observation de l’assemblage. En d’autres termes, un opérateur enseigne au robot comment assembler une pièce et, grâce au système de vision et à l’intelligence artificielle, une fois que l’opérateur a terminé, le robot est capable d’imiter et de reproduire le même assemblage sans avoir besoin d’être programmé pour le faire.

Figura 17. Brazo robótico imitando a una persona. Fuente: Kuka (2021)
- Suivi: l’idée est que les robots puissent assister les opérateurs de manière autonome, en les suivant dans leur tâche de routine afin qu’ils puissent accéder rapidement à un outil, par exemple, dans le cas d’un ouvrier de maintenance, pour placer des fruits dans une boîte, parmi de nombreux autres cas d’utilisation.

- Du texte à l’image pour former les robots : sur la base des dernières avancées en matière de génération d’images à partir de textes grâce à des modèles de diffusion, l’idée est de pouvoir donner au robot un texte contenant des instructions pour une action afin qu’il puisse avoir une idée visuelle de ce qu’il doit faire, ce qui est quelque chose de très inné et naturel chez les humains. De cette manière, le robot pourrait commander quelque chose, se rendre à un endroit, placer des objets de manière autonome, parmi beaucoup d’autres.
Conclusion
Dans cet article, nous nous sommes concentrés sur l’intelligence et la vision artificielles dans la robotique industrielle et nous n’avons cité que quelques-uns des nombreux cas d’utilisation, études et avancées qui se produisent à une vitesse vertigineuse. En dehors de l’industrie et de la robotique industrielle, il existe de nombreux autres cas et, bien que nous soyons encore à des années-lumière de l’AGI, c’est-à-dire de l’intelligence artificielle dans laquelle un robot est égal ou plus intelligent qu’un être humain, de nombreux processus qui sont actuellement programmés pour être automatisés par un robot seront appris par ces derniers de manière totalement autonome dans les années à venir. En fait, le dernier robot de Google est un assistant destiné à aider les humains dans certaines tâches ménagères : imaginez-vous ne pas avoir à débarrasser la table à la fin du repas, ou ne plus jamais avoir à dépoussiérer les étagères ou à ranger le jardin ? Cela semble incroyable, mais comme nous avons vécu ces dernières années où de nombreuses choses que nous ne pouvions pas imaginer sont devenues un fait quotidien, nous pouvons dire que la fiction en matière technologique n’est peut-être pas aussi éloignée de la réalité que nous le pensons.

Écrit par Sergio Redondo Cabanillas, responsable R&D chez Bcnvision Group.
Voulez-vous continuer à lire les blogs sur la vision industrielle ? cliquez ici
Bibliographie
1- Qu’est-ce qu’un robot industriel ? Définition et caractéristiques
https://robotnik.eu/es/que-es-un-robot-industrial-definicion-y-caracteristicas/
2- Intelligence artificielle et robotique dans l’industrie manufacturière
https://www.ennomotive.com/artificial-intelligence-robotics/
3- Technologie basée sur l’intelligence artificielle dans les robots industriels
https://www.openaccessgovernment.org/artificial-intelligence-based-technology-industrial-robots/131495/
4- L’impact de l’IA sur les robots industriels de la prochaine génération
https://www.roboticstomorrow.com/story/2021/03/the-ai-impact-for-next-gen-industrial-robots/16400/
5- Évolution de la robotique industrielle
https://www.edsrobotics.com/blog/evolucion-robotica-industrial/
6- Robots industriels : technologie et applications
https://www.sicma21.com/robots-industriales-tecnologia-y-aplicaciones/
7- Qu’est-ce qu’un cobot ?
https://cadecobots.com/que-es-un-cobot/
8- Cobot vs robot industriel
https://www.universal-robots.com/es/blog/diferencias-cobot-y-robot-industrial/
9- Robot AGV : caractéristiques, typologies et fonctions
https://www.grupoioe.es/agv-robot/
10- Drones industriels
https://www.atriainnovation.com/drones-industriales/
11- Robots maléfiques prêts à détruire l’humanité
https://science.howstuffworks.com/10-evil-robots.htm
12- Cette IA détermine votre sexe juste en vous regardant dans les yeux
https://www.muyinteresante.es/doctor-fision/articulo/esta-ia-averigua-tu-genero-solo-con-mirarte-a-los-ojos-741647647691
13- Les compétences humaines que les machines ne peuvent remplacer
https://blogcandidatos.springspain.com/transformacion-digital/habilidades-humanas-que-no-pueden-suplir-las-maquinas/
14- Dalle-bot papier
https://arxiv.org/pdf/2210.02438.pdf
15- Robot Google
https://www.youtube.com/watch?v=Jy3zjXK4ao4
16- Le robot le plus avancé de Google
https://www.youtube.com/watch?v=dCPHGwW9SOk
17- Robot Dalle2
https://www.youtube.com/watch?v=_c5rcYwPTQg