Dépalettisation Bin Picking de pneus
A cette occasion nous parlerons de la solution universelle de dépalettisation Bin Picking de pneus intégrée par Ingenersun et avec un système de vision 3D développé par Bcnvision.
L’histoire à succès porte sur la dépalettisation Bin Picking de pneus, à l’aide d’un robot anthropomorphe et d’une vision 3D.
INGENERSUN est une ingénierie spécialisée dans l’automatisation et la robotisation des processus industriels située à Zamudio, Biscaye.
Les projets d’automatisation clés en main d’INGENERSUN fournissent des solutions personnalisées complètes pour répondre aux besoins de nos clients. Son personnel multidisciplinaire avec une vaste expérience dans le secteur permet à INGENERSUN de fournir ses propres solutions dans tous les domaines du projet.
INGENERSUN gère les projets du début à la livraison de l’installation de manière à garantir une grande flexibilité dans la conception et une réponse rapide pour adapter la solution aux besoins particuliers de chaque client.
Ce dépalettisation Bin Picking universel de pneus fonctionne sur :
- Une piste de 15 mètres
- Avec 6 baies de téléchargement
- Hauteur de pile maximale de 1600 mm
- multi-référence
- Avec identification par code-barres par les lecteurs.
- Rectification automatique des trajectoires pour les colonnes déviées.
- Signalisation individuelle de l’état des baies.
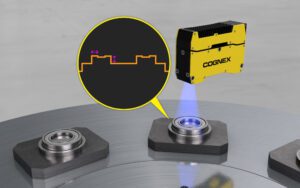
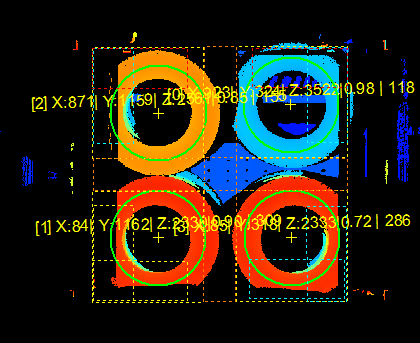
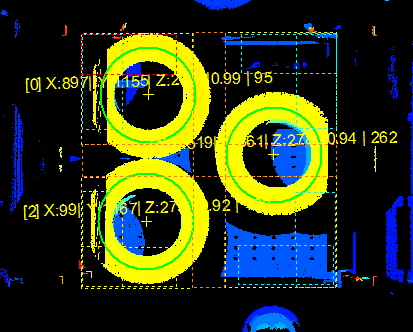
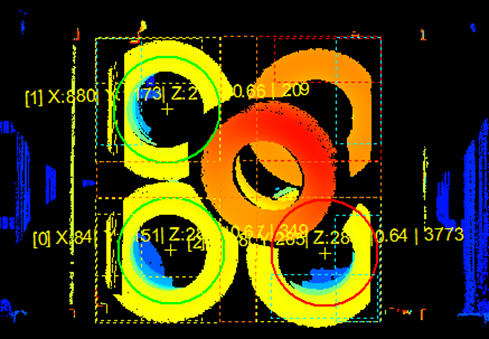
La solution de vision artificielle est basée sur la technologie d’acquisition 3D, elle comprend un dispositif d’acquisition Photoneo, qui génère le nuage de points en projetant des motifs laser et les algorithmes de reconstruction correspondants, développés par Bcnvision et selon les besoins transmis par Ingenersun pour la dépalettisation Bin Picking de pneus.
Cette technologie génère un nuage de points résultant de précision et avec un champ de vision très large, ce qui lui permet d’être mise en œuvre dans une grande variété de situations.
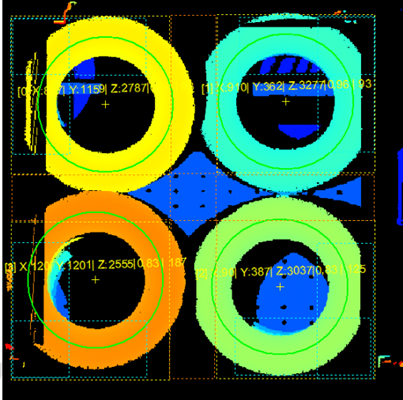
Une fois le robot localisé dans une position nominale, le système de vision effectue l’acquisition et le résultat est un nuage de points qui est traité afin d’obtenir les coordonnées (x,y,z) et ainsi pouvoir effectuer la dépalettisation Bin Picking de pneus.

Ces coordonnées sont envoyées à l’automate, qui à son tour traite et génère une stratégie de déchargement optimisée, basée sur un algorithme développé pour effectuer la saisie sans générer de collisions avec le conteneur ou la pince.

Par la suite, le robot se place au centre de chaque colonne et effectue le déchargement complet de celle-ci, incluant un système de correction de trajectoire pour absorber les variations d’emplacement des pneumatiques le long de la colonne.
Le robot est situé sur une piste qui lui permet de passer par plusieurs emplacements réservés au positionnement du conteneur de pneus appelés baies et de pouvoir décharger en continu. Le robot et le dispositif d’acquisition sont montés sur le rail, offrant deux avantages principaux :
- Un étalonnage unique avec un élément situé sur ladite plate-forme. Cet étalonnage n’est requis que la première fois ou lorsqu’il y a un changement matériel important.
- Profitez du moment de déplacement et de déchargement d’un conteneur pour traiter le conteneur suivant et ainsi optimiser le cycle de la machine.
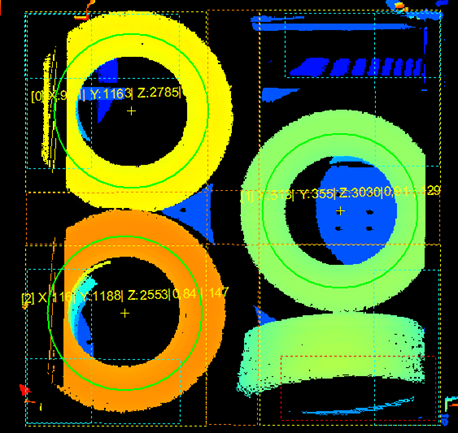
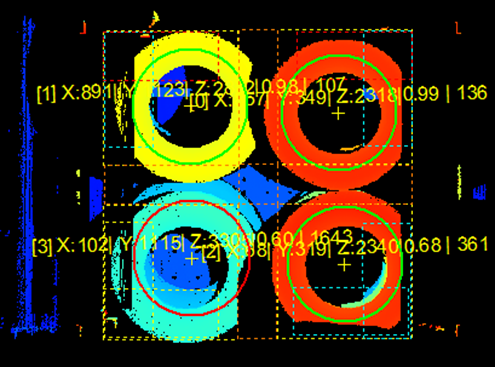
Le système a été développé en considérant deux distributions possibles dans le conteneur :
- Distribution carrée.
- Répartition triangulaire. Avec cette distribution, toutes les options sont considérées au niveau de l’orientation.
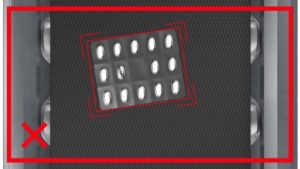
Ces distributions sont fixes afin de permettre l’ajout d’une détection d’anomalies pouvant gêner les trajectoires du robot une fois la séquence de téléchargement exécutée.
Anomalies cataloguées :
- Colonnes avec pneus inclinés en dehors de la plage acceptée.
- Pneus qui se chevauchent
La détection et l’acquisition des coordonnées ont été configurées pour différents types de récipients, ce qui peut faire varier les plans de référence, et différents algorithmes sont également générés, en fonction du diamètre interne de chaque référence prédéfinie, afin de garantir une plus grande précision dans le calcul.
En plus du dépalettiseur, une deuxième station est dédiée au dépilage automatique et multiréférence des pneus, sans besoin de réglage et avec une vitesse réglable.
Ci-dessous, vous pouvez regarder la vidéo de l’histoire à succès aimablement fournie par Ingenersun sur le ramassage dépalettisant des pneus dans les poubelles.
Avez-vous besoin d’un système de vision 3D, de Bin Picking ou de tout autre système de vision industrielle?
N’hésitez pas à visiter www.bcnvision.com et contactez-nous.