Despaletizado Bin Picking de neumáticos
En esta ocasión hablaremos sobre la solución de despaletizado bin picking de neumáticos universal integrada por Ingenersun y con un sistema de visión 3D desarrollado por Bcnvision.
El caso de éxito se centra en un despaletizado bin picking de neumáticos, mediante un robot antropomórfico y visión 3D.
INGENERSUN es una ingeniería especializada en la automatización y robotización de procesos industriales situada en Zamudio, Vizcaya.
Los proyectos de automatización “llave en mano” de INGENERSUN aportan soluciones integrales a medida para responder a las necesidades de nuestros clientes. Su personal multidisciplinar y con amplia experiencia en el sector le permite a INGENERSUN aportar soluciones propias en todos los ámbitos del proyecto.
INGENERSUN gestiona los proyectos desde el inicio hasta la entrega de la instalación de forma que garantiza una gran flexibilidad en diseño y respuesta rápida para la adaptación de la solución a las necesidades particulares de cada cliente.
Este despaletizador de neumáticos universal trabaja en:
- Un track de 15 metros
- Con 6 bahías de descargas
- Altura máxima de pila de 1600mm
- Multireferencia
- Con la identificación de códigos de barras por lectores.
- Rectificación automática de trayectorias para columnas desviadas.
- Señalización individual del estado de las bahías.
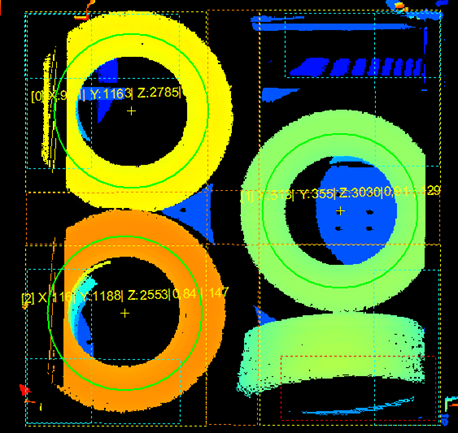
La solución de visión artificial está basada en tecnología de adquisición 3D, incluye un dispositivo de adquisición Photoneo, que genera la nube de puntos mediante la proyección de patrones láser y los algoritmos de reconstrucción correspondientes, elaborados por Bcnvision y acorde a las necesidades transmitidas por Ingenersun para el despaletizado bin picking de neumáticos.
Esta tecnología genera una nube de puntos resultante de precisión y con un campo de visión muy amplio, que le permite ser implementada en una gran variedad de situaciones.
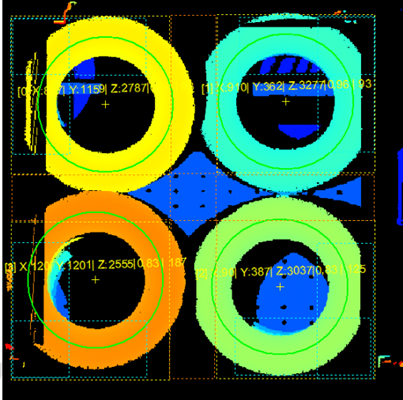
Una vez el robot se ha ubicado en una posición nominal, el sistema de visión realiza la adquisición y el resultado es una nube de puntos que es procesada con la finalidad de obtener las coordenadas (x,y,z) y de esta manera poder realizar el despaletizado bin picking de neumáticos

Estas coordenadas son enviadas al autómata, que a su vez procesa y genera una estrategia de descarga optimizada, basándose en un algoritmo desarrollado para realizar la cogida sin generar colisiones con el contenedor o la pinza.

Posteriormente, el robot se ubica sobre el centro de cada columna y realiza la descarga completa de ésta, incluyendo un sistema de corrección de trayectorias para absorber variaciones en la ubicación de los neumáticos a lo largo de la columna.
El robot está ubicado sobre un track que le permite recorrer varias ubicaciones reservadas para el posicionamiento del contenedor de neumáticos llamados bahías y poder realizar la descarga de un modo continuo. El robot y el dispositivo de adquisición están montados sobre el track aportando dos ventajas principales:
- Una sola calibración con un elemento ubicado en dicha plataforma. Esta calibración solo se requiere la primera vez o cuando hay un cambio a nivel hardware considerable.
- Aprovechar el momento del desplazamiento y descarga de un contenedor para procesar el contenedor siguiente y de esta forma optimizar el ciclo de la máquina.
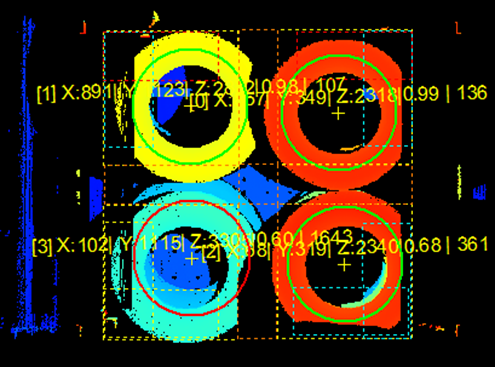
El sistema se ha desarrollado considerando dos distribuciones posibles en el contenedor:
- Distribución cuadrada.
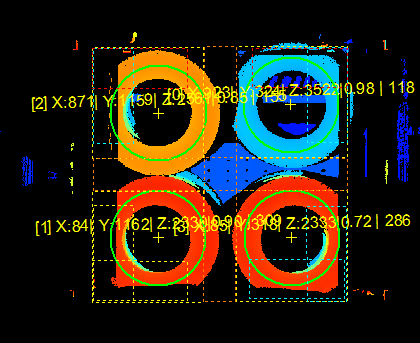
- Distribución triangular. Con esta distribución se consideran todas las opciones a nivel de orientación.
Estas distribuciones se fijan para poder permitir la adición de una detección de anomalías que puedan impedir las trayectorias del robot una vez se ejecuta la secuencia de descarga.
Anomalías catalogadas:
- Columnas con neumáticos inclinados fuera del rango aceptado.
- Neumáticos superpuestos
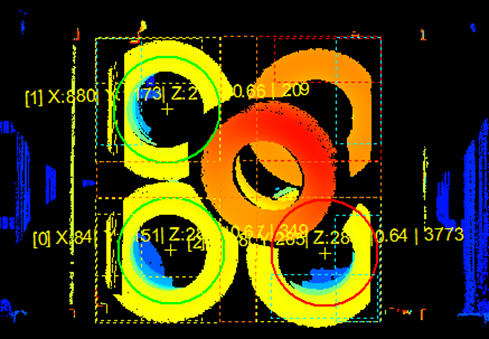
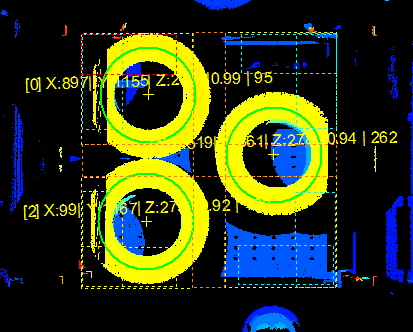
La detección y obtención de las coordenadas se ha configurado para distintos tipos de contenedor, que pueden provocar la variación de los planos de referencia y además también se generan distintos algoritmos, en función del diámetro interior de cada referencia preestablecida, para garantizar una mayor precisión en el cálculo.
Además del despaletizador hay una segunda estación dedicada a desapilar los neumáticos de forma automática y multireferencia, sin necesidad de regulación y con cadencia regulable.
A continuación, puedes ver el vídeo del caso de éxito cedido amablemente por Ingenersun sobre el despaletizado bin picking de neumáticos.
¿Precisa de visión 3D, realizar un Bin Picking o cualquier otro sistema de visión artificial?
Leer más sobre otras Soluciones con bin picking
No lo dude visite www.bcnvision.es y contáctenos.