Bin Picking y control dimensional de tubos soldados
La máquina que a continuación explicamos con bin picking y control dimensional de tubos soldados, ha sido diseñada por MITEC ENGINY, empresa dedicada a la automatización de procesos productivos industriales con más de 15 años de experiencia en el sector, ha diseñado una máquina para optimizar un proceso de fabricación manual de Isotubi.
Isotubi es una empresa dedicada a la fabricación de tubos soldados y accesorios de acero inoxidable desde hace más de 40 años.
Para realizar la máquina de control dimensional de tubos soldados con éxito han colaborado varias empresas con MITEC ENGINY, como Bcnvision con todo lo relacionado con la visión artificial y Stäubli para la manipulación de piezas.
El proceso que se lleva a cabo en la máquina es el siguiente:
Se cogen piezas una a una de un contenedor, donde se encuentran de forma caótica y se dejan en las matrices de embutición de la máquina de Isotubi. Una vez embutidas, se comprueba si los tamaños de la embutición están dentro de tolerancia, y se dejan las piezas en la caja que corresponde.

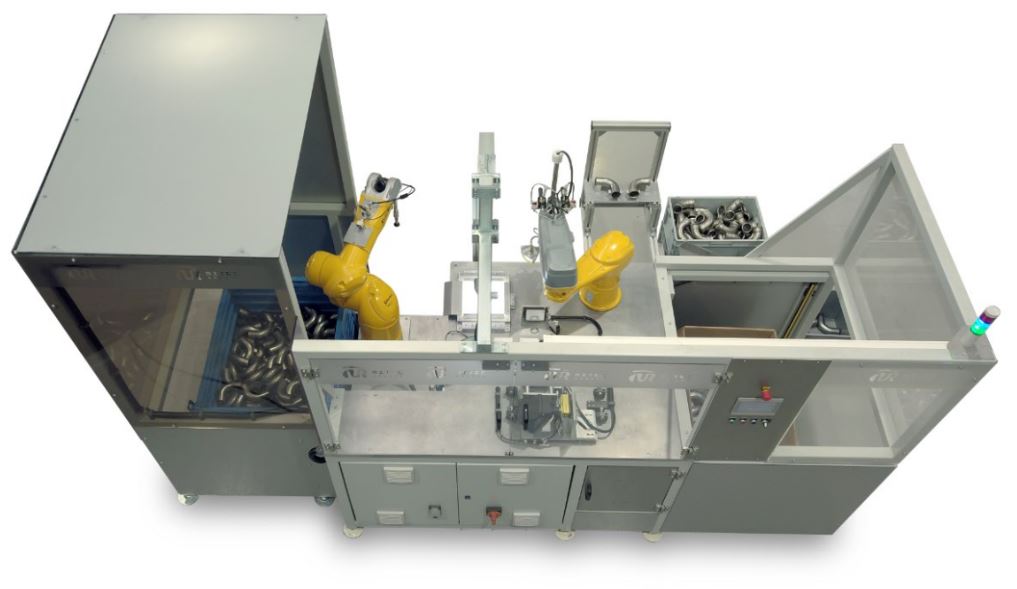
La máquina consta de dos partes diferenciadas: La estación del «Bin Picking» y la estación de manipulación de las piezas para el control dimensional:
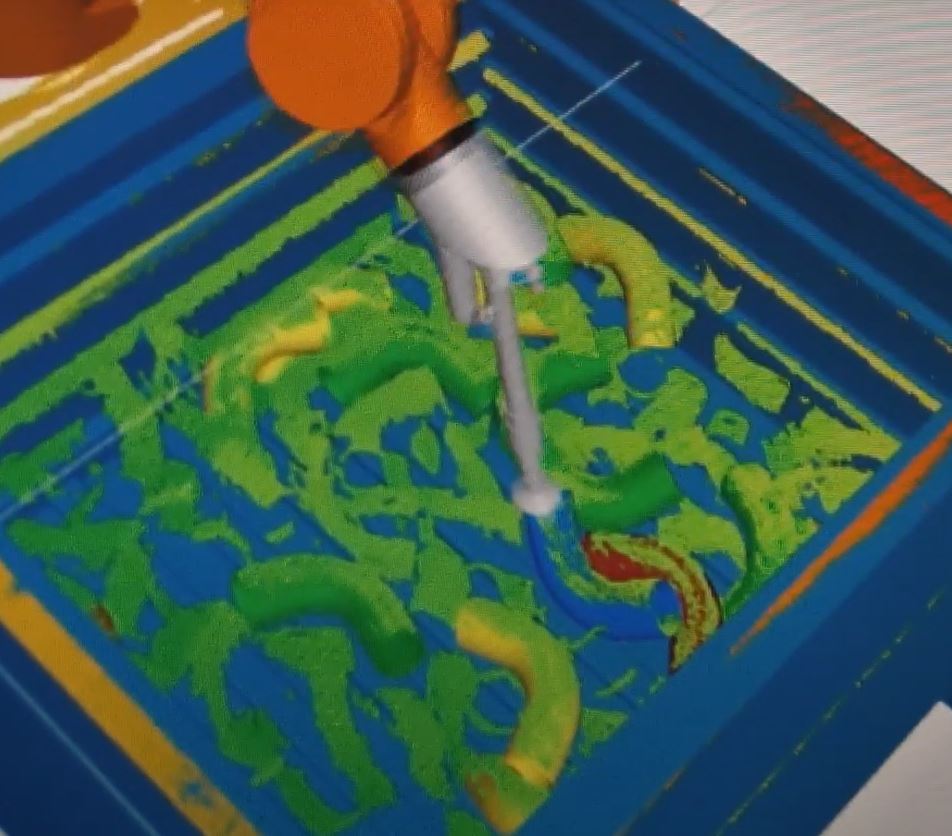
La estación del Bin Picking, consta de un escáner 3D de la marca PHOTONEO que se encarga de detectar las piezas que hay dentro del contenedor, analiza cuáles se pueden coger con el robot y calcular las trayectorias. El robot utilizado en un TX2-90L de Stäubli.
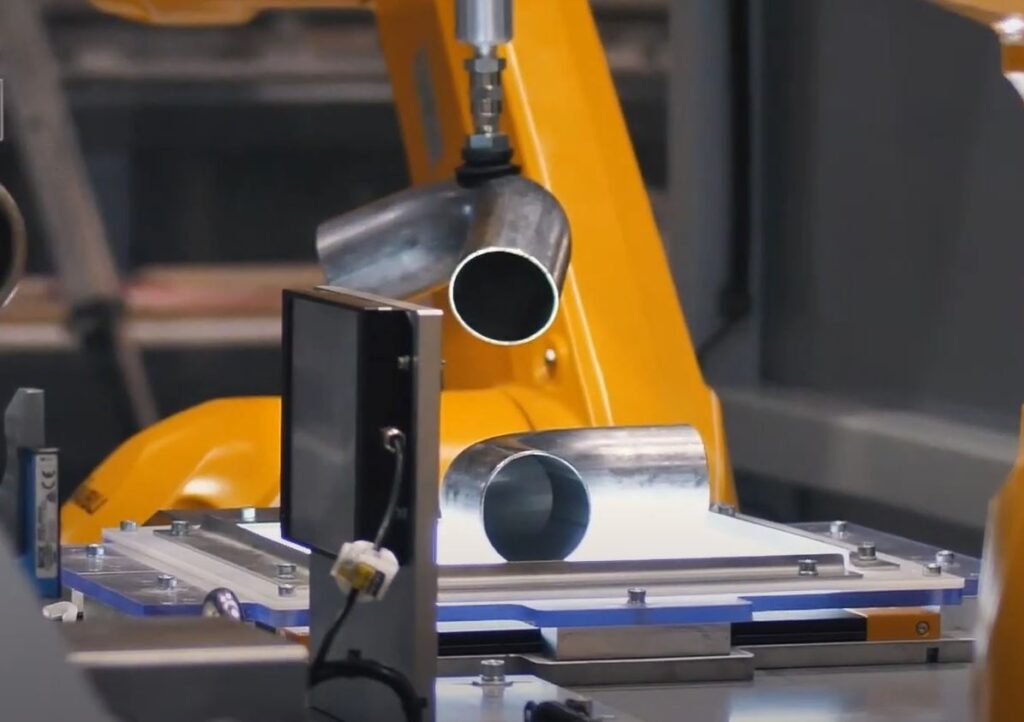
La estación de manipulación de las piezas está formada por una zona de reposicionado con un robot TS2-80 de Stäubli y una estación de control dimensional. El primer elemento de esta parte que interviene en el proceso es el reposicionado, formado por una mesa de polietileno de color blanco con un » backlight » y una columna con una cámara compacta de Cognex IS7600M-363-50 suministrada por Bcnvision, con la siguiente operativa:
El robot TX2-90L, transporta las piezas hasta la zona de re-posicionado. Una vez está la pieza encima de la mesa, la cámara detecta la orientación de la pieza. Si la orientación ya es correcta, el robot TS2-80 puede ir a buscar la pieza, si no, el TX2-90L gira la pieza los grados necesarios para una correcta orientación.
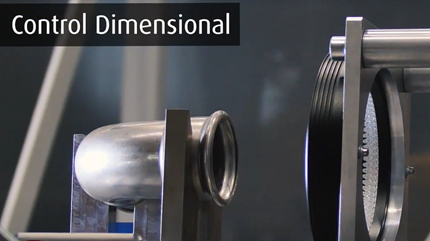
El robot TS2-80 encarga de distribuir las piezas en las diferentes subestaciones de la parte de la manipulación de piezas, con la siguiente operativa: El TS2-80 recoge la pieza de la estación de re-posicionado según las coordenadas indicadas por la cámara IS7600M-363-50, y la lleva hasta la primera matriz de embutición de la máquina NPC4 de Isotubi, esta embute la pieza por una cara, y el robot TS2-80 re-posiciona la pieza en la segunda matriz, donde se embute la segunda cara. Una vez la pieza está embutida por ambas caras, el robot TS2-80 la lleva a la estación de control dimensional de los tubos soldados. La estación de control dimensional está formada por una cámara de visión de Cognex IS9912M-363-50, su óptica, una luz coaxial y un «backlight» y un sistema de sujeción / orientación de la pieza, permitiendo girarse al fin de poder hacer las fotos en las dos caras embutidas.
Una vez ha finalizado el proceso de control dimensional de tubos soldados, el robot TS2-80 coge la pieza y la deja en el contenedor de piezas acabadas, si la pieza es buena según el control dimensional o en la caja de Scrap si la pieza no es buena según el control.
Una de las ventajas de la máquina, es que es capaz de trabajar con 6 modelos diferentes de pieza, sólo intercambiando las bases del sistema de sujeción / orientación, y la herramienta del robot TS2-80.
Te interesa seguir leyendo aplicaciones reales o más casos de éxito entra en aquí.
Aquí te mostramos el vídeo de la máquina donde podrás ver perfectamente las diferentes áreas de la inspección.




