Visión industrial 3D en movimiento
Photoneo presentó a finales del 2020 una la tecnología visión 3D industrial en movimiento, sin comprometer la calidad y la velocidad.

La visión industrial 3D en movimiento ha planteado un gran desafío para los desarrolladores de sistemas de visión 3D, ya que ninguna de las tecnologías de detección 3D existentes ha podido superar por completo sus propias limitaciones. Al optar por un método u otro, el cliente siempre se ha quedado con un compromiso entre la calidad y la velocidad del dispositivo.
Photoneo inventó una nueva tecnología llamada Parallel Structured Light, que utiliza luz estructurada en combinación con un sensor de imagen CMOS de obturador de mosaico patentado para capturar objetos en movimiento con alta calidad y poder obtener una visión industrial 3D en movimiento con precisión y alta resolución. El sensor consta de bloques de superpíxeles que se dividen en subpíxeles. El láser procedente de un proyector de luz estructurada está encendido todo el tiempo, mientras que los píxeles individuales se encienden y apagan repetidamente.
La gran limitación, hasta ahora, del método de luz estructurada es que la cámara captura secuencialmente los patrones codificados por el proyector y, dado que la adquisición de imágenes de una superficie 3D requiere varios fotogramas, no se puede utilizar para objetos dinámicos o mientras el sensor está en movimiento la salida estaría distorsionada
Esta nueva tecnología sobre visión artificial industrial 3D en movimiento, permite la captura de una escena dinámica sin desenfoque, reconstruyendo su imagen 3D a partir de una sola toma del sensor. Esto significa que “paraliza” la escena para adquirir múltiples imágenes de luz estructurada y obtener una instantánea de alta calidad del objeto en movimiento.
Photoneo implementó esta tecnología en la cámara 3D, MotionCam-3D.
Características:
- Tecnología patentada en el interior en forma de sensor CMOS novedoso.
- Escaneo de área de objetos en movimiento a 144 km/h.
- Resistente a vibraciones y luz ambiental sin producir distorsiones o adquisiciones rotas.
- Máxima resolución y precisión de escaneo 3D de escenas dinámicas .
- Alto nivel de detalle en los bordes, sin bordes borrosos para objetos que se mueven hasta 40 m/s.
- Ultra alta densidad, nube de puntos con una resolución de 0,9 Mpx igual a 2 Mpx en el modo para escenas estáticas.
- Potencia computacional, proporciona 15 millones de puntos 3D por segundo.
- Alcance de escaneo inigualable desde 36 cm hasta 3 m.
- Fácil configuración, ahorro de recursos de PC y un rango de escaneo incomparable.
- Dispositivo listo para la industria con IP65, PoE y calibración térmica.
Parallel Structured Light
Aporta la calidad y la resolución de vanguardia del escaneo de luz estructurada en la reconstrucción 3D de escenas altamente dinámicas. Esta novedosa tecnología patentada sobre visión industrial 3D en movimiento, utiliza un diseño de sensor inteligente que realiza la adquisición en una instantánea, en lugar del escaneo secuencial de un sensor de imagen estándar. Esto significa que el método de luz estructurada en paralelo prácticamente congela la escena 3D en el tiempo.
Hardware Trigger y conexión en cadena
Es posible configurar varias cámaras MotionCam-3D para que funcionen sincrónicamente utilizando la función de activación del disparo con el hardware y salidas GPIO. Esta configuración requiere cables especiales proporcionados a pedido, ya que el cable de alimentación estándar contiene solo 2 cables para la entrada de energía. En esta configuración, cada cámara activa el disparo de la siguiente, una vez que ha realizado su propia captura, creando un disparo en secuencia.
Resoluciones de escaneo
MotionCam-3D utiliza un sensor CMOS personalizado y estructurado en paralelo con una tecnología de luz para producir nubes de puntos 3D de objetos escaneados.
En el caso de los escáneres PhoXi 3D, la medición de profundidad se logra mediante la proyección de patrones de luz estructurada. De esta manera el escáner mide un punto 3D correspondiente a cada píxel del sensor de imagen.
MotionCam-3D no se basa en patrones de luz estructurados, en su lugar, utiliza barridos láser para la iluminación. El sensor CMOS puede usar diferentes esquemas de subpíxeles para simular diferentes patrones de luz estructurada.
Los diferentes esquemas de subpíxeles contribuyen a un único punto 3D (medida única).
El modo de subpíxeles (la forma en que se mide cada punto 3D) está controlado por el parámetro Resolución. Hay 7 diferentes modos numerados del 0 al 6. Los introducimos en un orden arbitrario para mayor claridad.
Requisitos del sistema
Asegúrese de que su ordenador cumpla con los requisitos mínimos del sistema para operar la MotionCam-3D. PhoXi Control funciona solo en sistemas operativos de 64 bits, Windows 10 o Ubuntu 16 son compatibles.
Modos de resolución
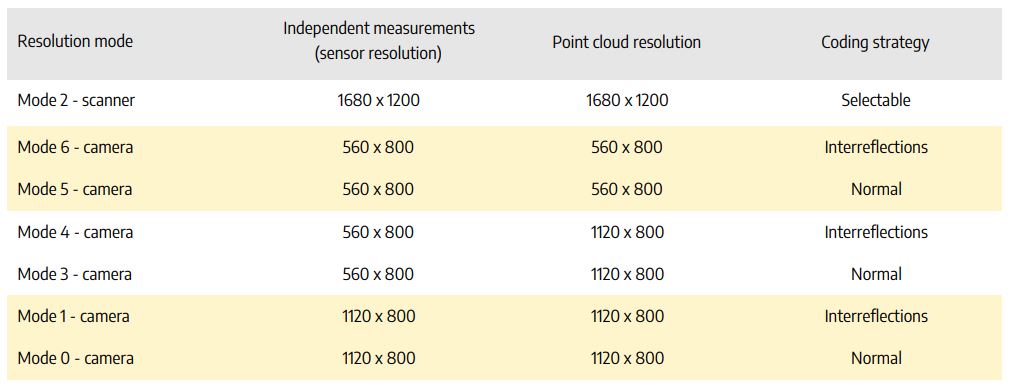
Modo de resolución 2 – Modo de escáner
El modo 2 cambia la cámara a un modo de escáner de alta resolución que se puede utilizar para escenas estáticas. En este modo, un punto 3D corresponde a un píxel en el sensor y todas las funciones de PhoXi Control se comportan de la misma forma que los escáneres.
El modo de escáner utiliza la resolución de trabajo completa del sensor de imagen: 1680 x 1200 píxeles. Por lo tanto, es capaz de producir casi 2 millones de puntos 3D.
Todos los demás modos permiten un rendimiento de la cámara de alto FPS con la capacidad de escanear objetos en movimiento. En los siguientes parámetros de escaneo no están disponibles cuando se selecciona cualquiera de los modos de cámara de alto FPS: Estrategia de codificación, Calidad de codificación y reconocimiento de Marker Space.
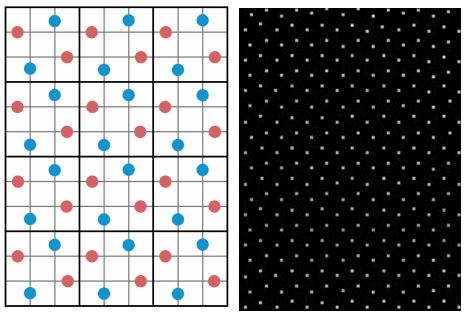
Modo de resolución 5 y 6 – Modos de cámara rápidos con distribución de puntos desigual
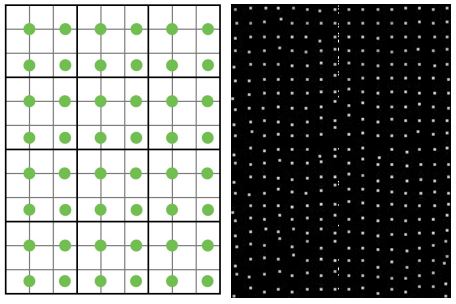
El modo 5 y el modo 6 producen un mapa de profundidad en una resolución de 560 x 800. La adquisición de fotogramas es más rápida en estos modos, pero los puntos 3D están distribuidos de forma desigual. Ver el diagrama de subpíxeles y la nube de puntos resultante de escaneando en la Figura 2.
El modo 5 y el modo 6 difieren en la estrategia de codificación. Modo 5 simula patrones de luz de la estrategia de codificación normal y el modo 6 simula los patrones de luz de las interreflexiones. Por la mayoría de las escenas, el Modo 6 produce una calidad superior exploraciones. El modo 5 se deja para fines de prueba.
Modo de resolución 3 y 4 – Modos de cámara rápidos con distribución uniforme de puntos
El modo 3 y el modo 4 son extensiones de los modos 5 y 6, respectivamente. Usan mediciones de sensores secundarios para calcular los puntos ubicados directamente entre los puntos. El mapa de profundidad resultante tiene la resolución de 1120 x 800. Las medidas secundarias se calculan en PhoXi Control. El modo 4 simula los patrones de luz con estrategia de codificación de interreflexiones y generalmente produce escaneos de mayor calidad.
Al capturar una escena dinámica, el Modo 4 es el recomendado ya que generalmente ofrece la mejor calidad resultados.
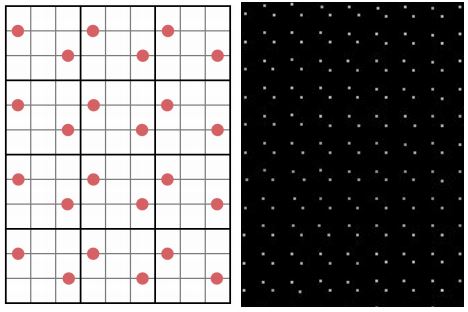
Modo de resolución 0 y 1- Modos de cámara con distribuciones de puntos regulares
Los modos 0 y 1 usan subpíxeles con el número más alto de mediciones directas para lograr la resolución del mapa de profundidad de 1120 x 800. La resolución que generalmente, produce es inferior a los Modos 3 y 4 debido a mayores requisitos computacionales, aumento de datos, velocidades de transferencia (~ 30 ms más lentas) y luz reducida, dando resultados de eficiencia con niveles de ruido más altos.
Leer otro artículo y ver más vídeos de la Cámara MotionCam 3D.
¿Quieres leer más artículos sobre visión 2d y 3d?




